My Research Goals
- Developing theories for what levels and types of human modeling are needed for effective teaming with machines, specifically by considering neurophysiological modalities
- Developing learning algorithms that enable machines to learn and adapt their behavior directly from human intentions, demonstration, and instructions
- Developing learning algorithms that learn from human agents and provide an explanation at different levels of abstraction in complex collaborative tasks.
A Project Portfolio To Grow
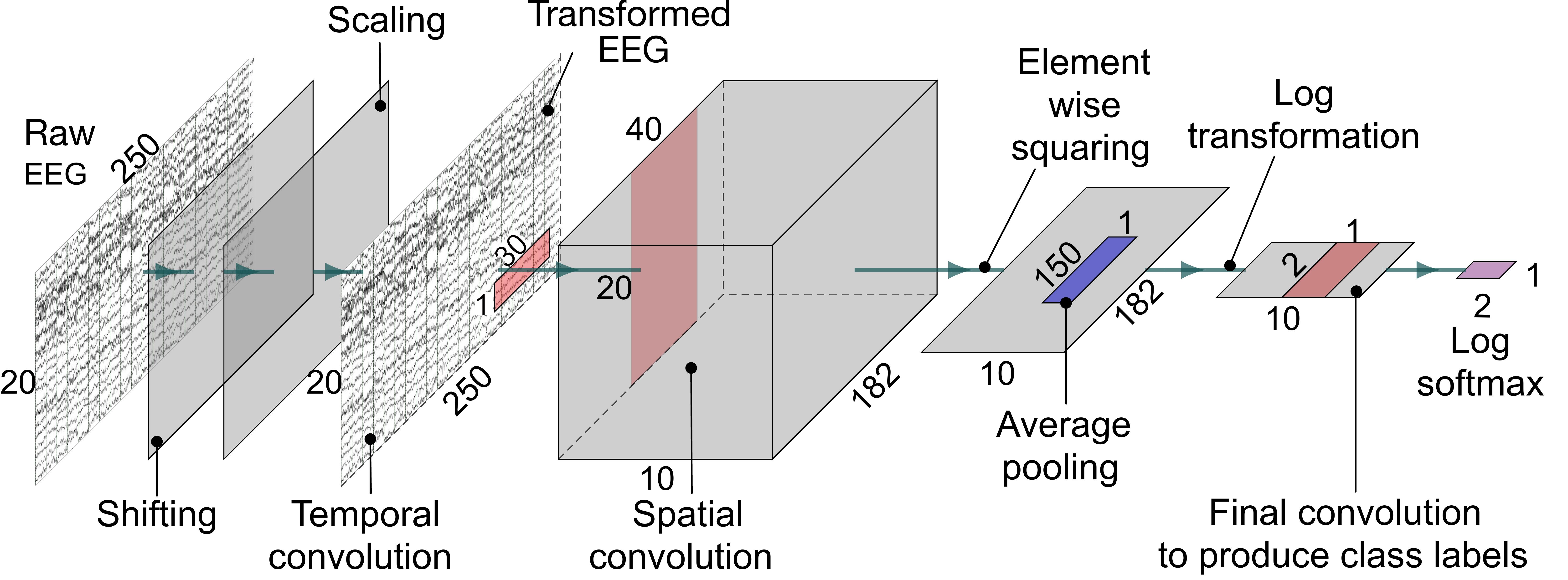
Using Physiological Measurements to Analyze the Tactical Decisions in Human Swarm Teams
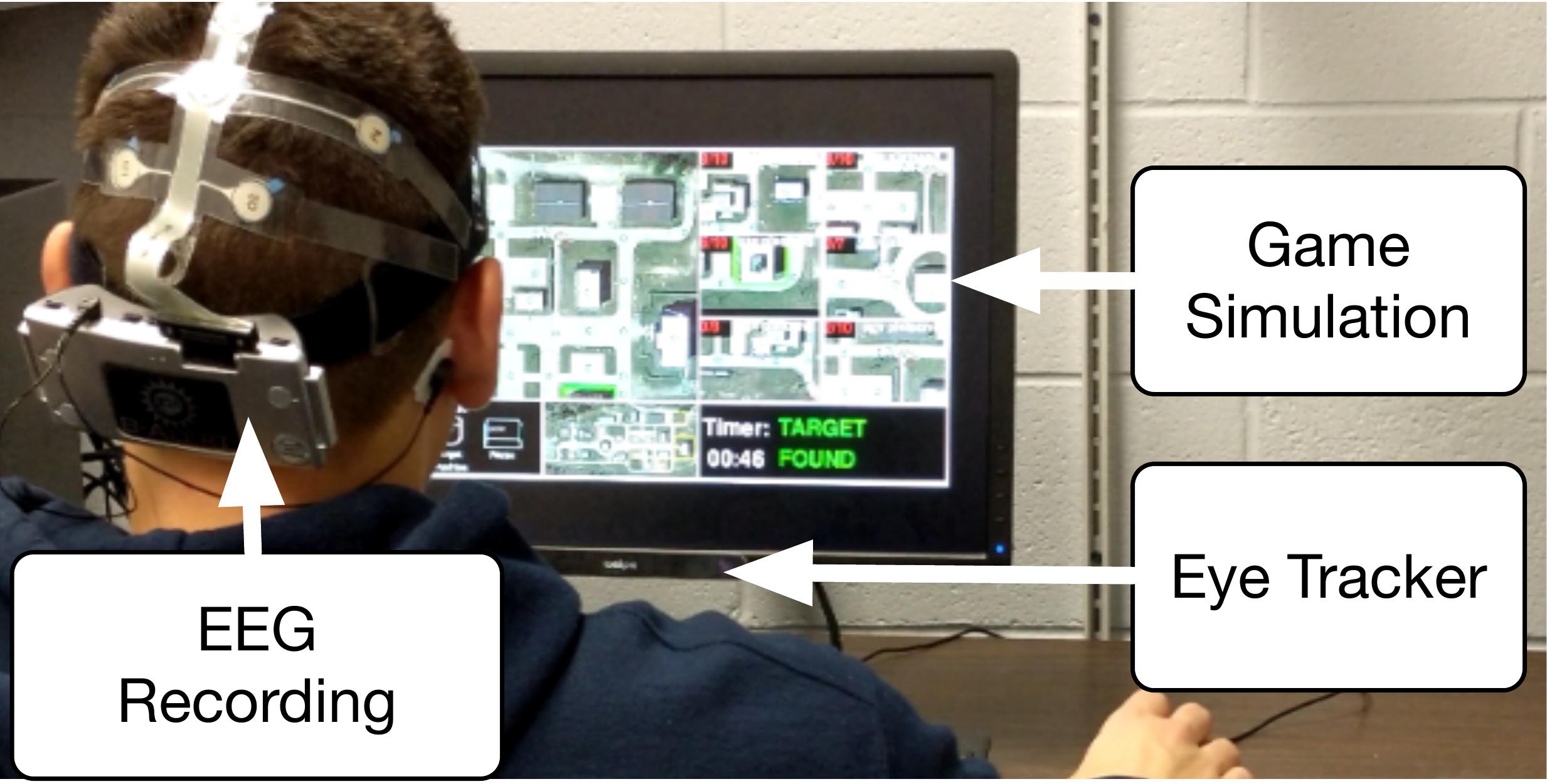
In this work, we explore the physiological correlates with the user’s tactical decisions in a simulated search and rescue mission.
Read moreTransfer Learning of Motor Difficulty Classification in Physical Human-Robot Interaction Using Electromyography
In this study, we present a convolution neural network (CNN) model to predict motor control difficulty using surface electromyography (sEMG) from human upper-limb during physical human-robot interaction (pHRI) task and present a transfer learning approach to transfer a learned model to new subjects.
Read moreFeatured categories
human-robot-interaction (7) python (7)Hemanth Manjunatha
A personal Site
How to say my name